Structural mechanics
Helicoidal modeling
The helicoidal modeling was applied to continuum mechanics
by Prof. Teodoro Merlini and me.
The angular equilibrium equations
at a point are written with respect to a fixed pole, and not with
respect to the point itself; as a consequence,
the angular equilibrium equations take the same
structure of the linear equilibrum equations.
The kinematic description is peculiar as well: it is based
on the concept of rototranslation, a motion that intimately couples
displacements and rotations of the materal particle of any
micropolar medium.
The proposed formalism was first applied to the modeling of
non-structured continua, and then to the modeling of beams
and shells. The resulting finite elements, developed without
resorting to EAS and/or ANS techniques, show remarkable properties
and appears to be free from locking phenomena.
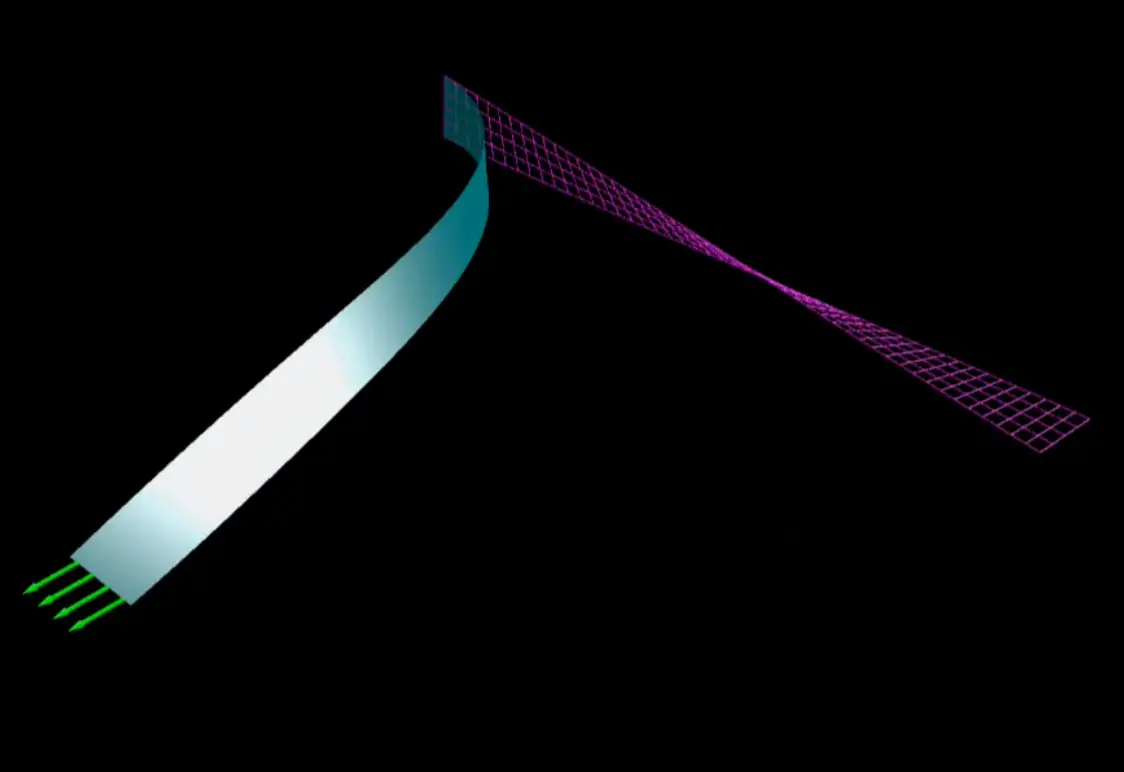
Beams
The elastic properties of composite beam sections
can be computed numerically. A well-established
numerical procedure has been recently enhanced and clarified by
me, Maria Chierichetti
and Prof. Paolo Mantegazza. A generalization to
beams made of piezo-electric materials was first developed,
followed by a version accounting for
magneto-electro-elastic materials and thermal loads.
A recent development allows to analyze the nonlinear response
of an arbitrary cross-section, accounting for large strains and nonlinear material
constitutive laws; both hyperelastic and elasto-plastic materials can be dealt with.
The nonlinear cross-section analisys code is also used within a novel
two-level analisys precedure for the simulation of large strain beam response.
The development of enhanced beam FEs based on the more recent results
is envisaged as well.
The same characterization procedure has been extensively used
for the structural optimization of beam sections. Excellent results
has been obtained, in cooperation with Prof.
Pierangelo
Masarati, for the optimization of
helicopter rotor blades actively twisted using piezo patches.
The research is now focused in developing efficient
procedures for the the topology optimization of beam cross sections.
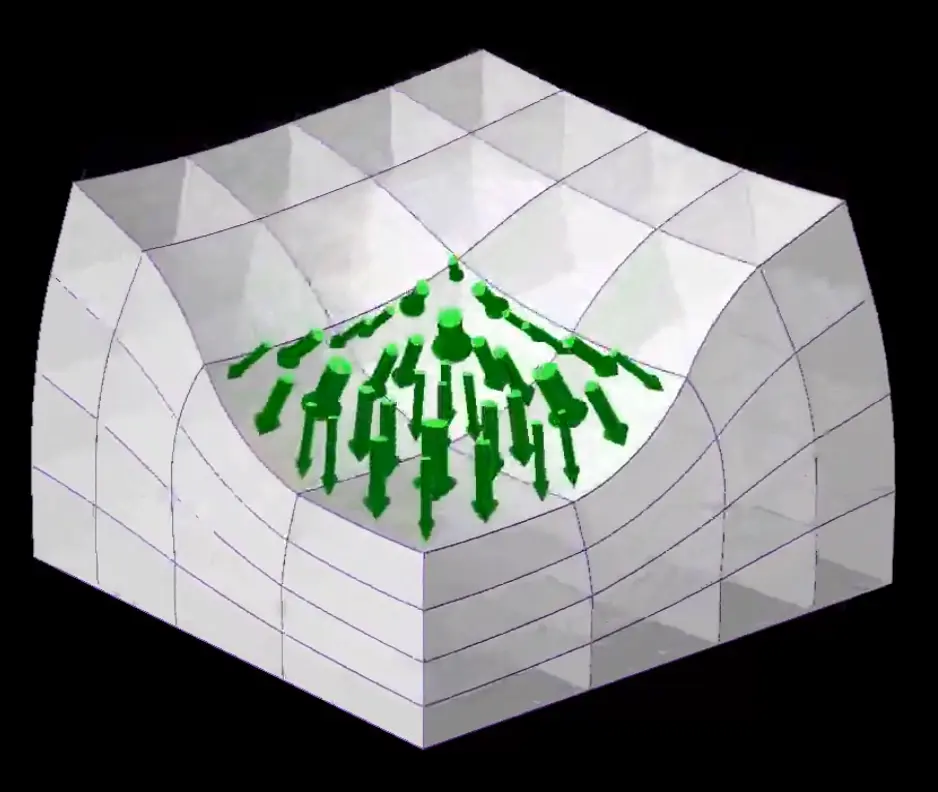
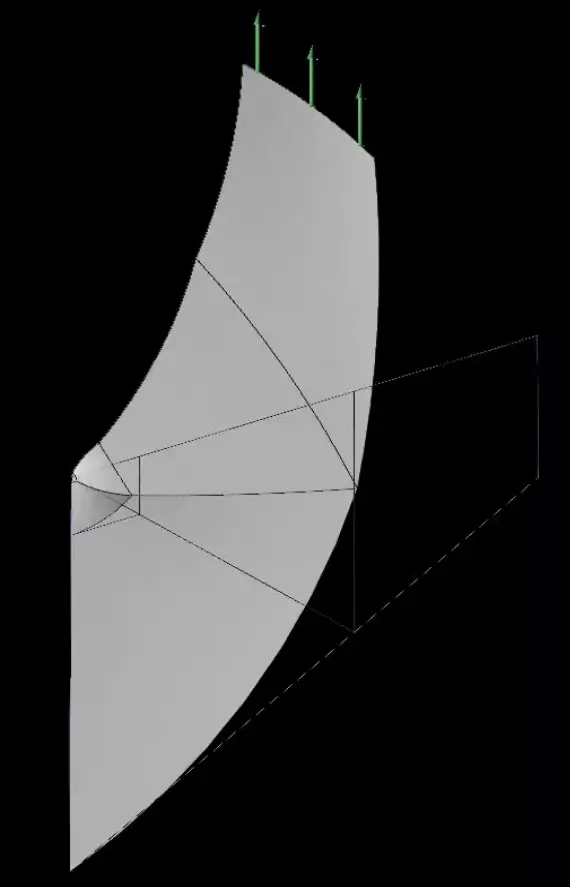
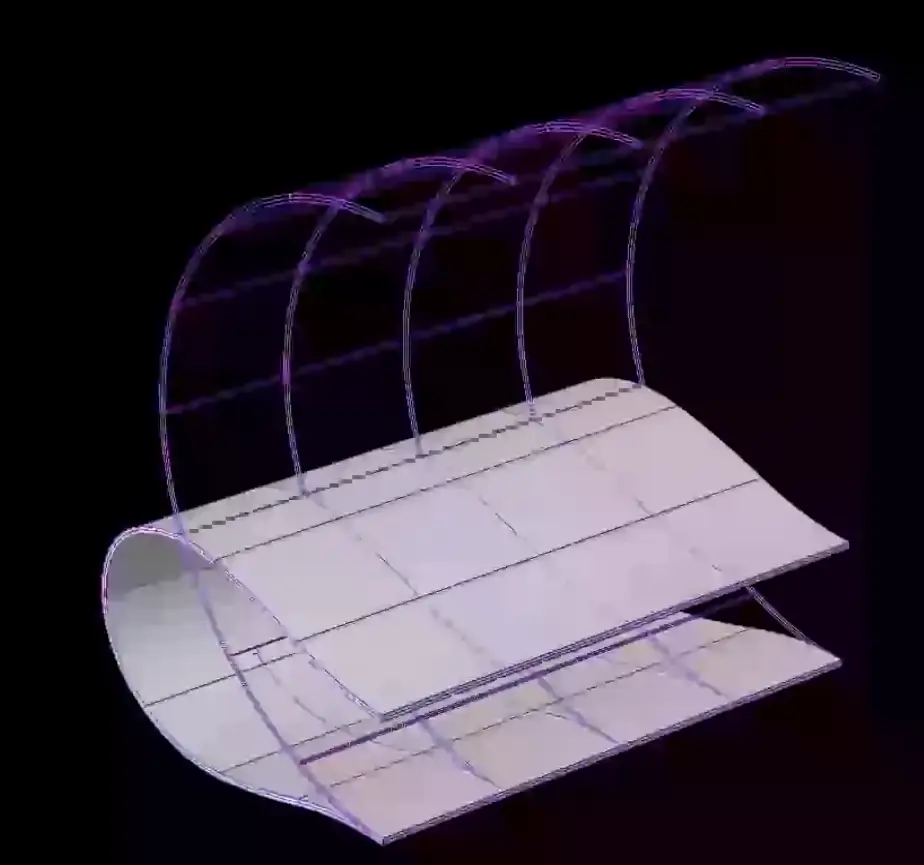
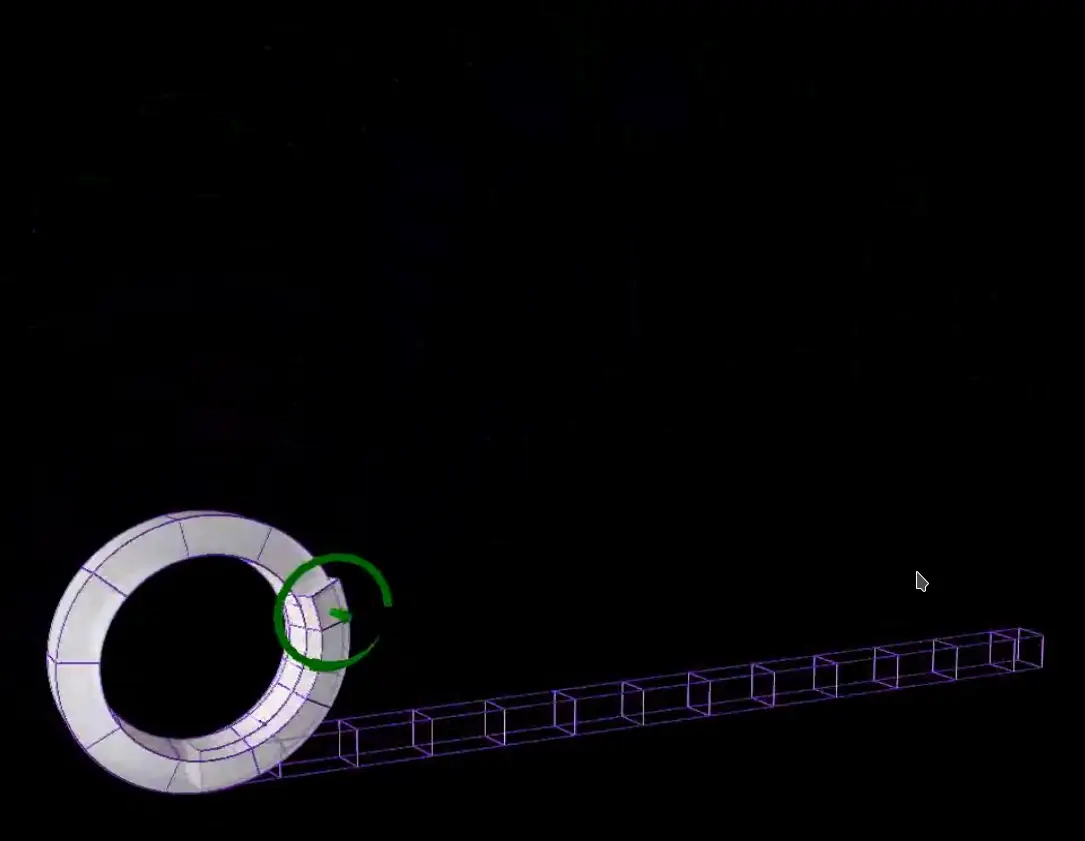
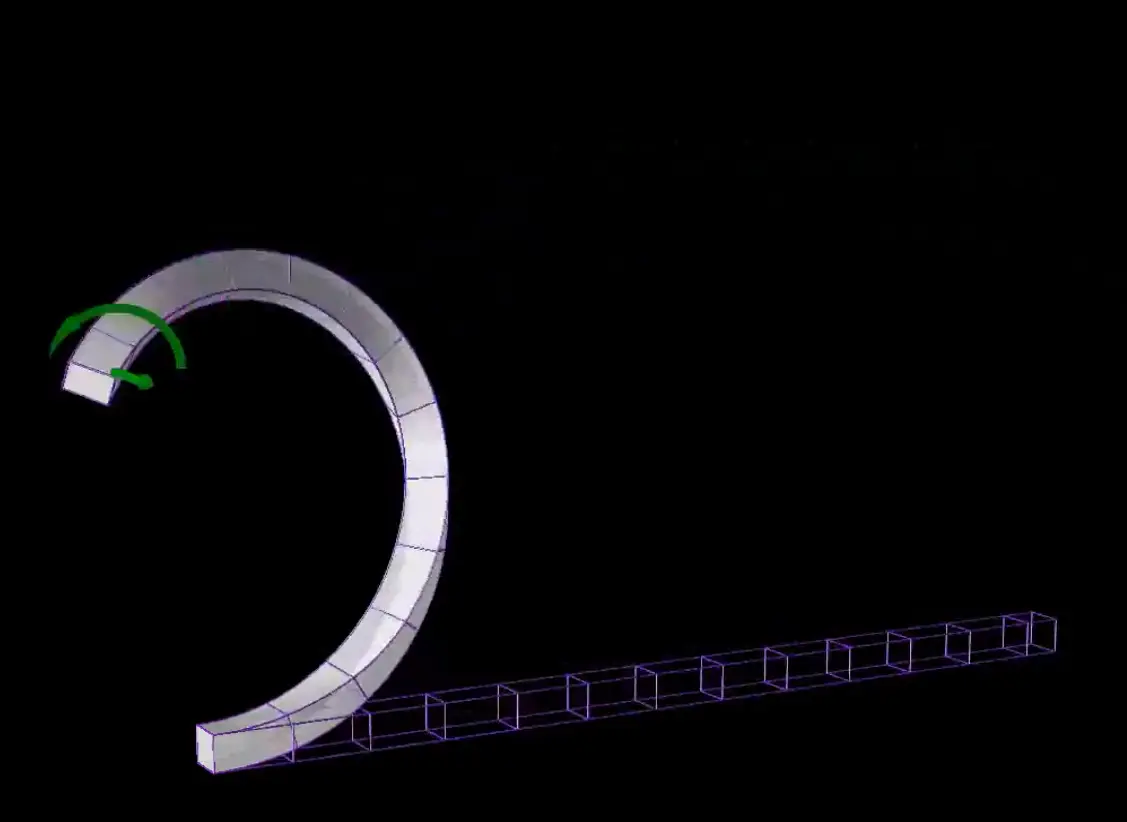
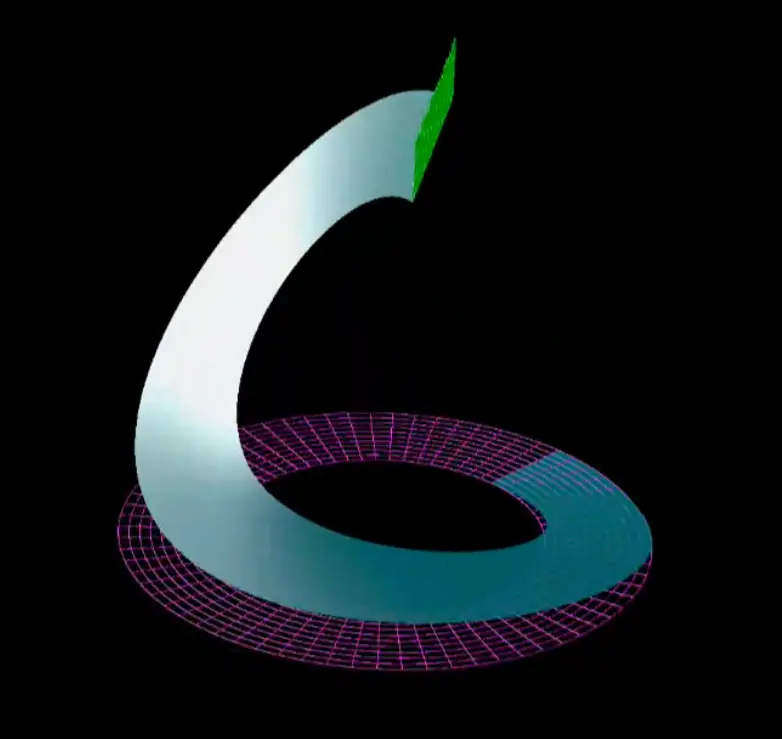
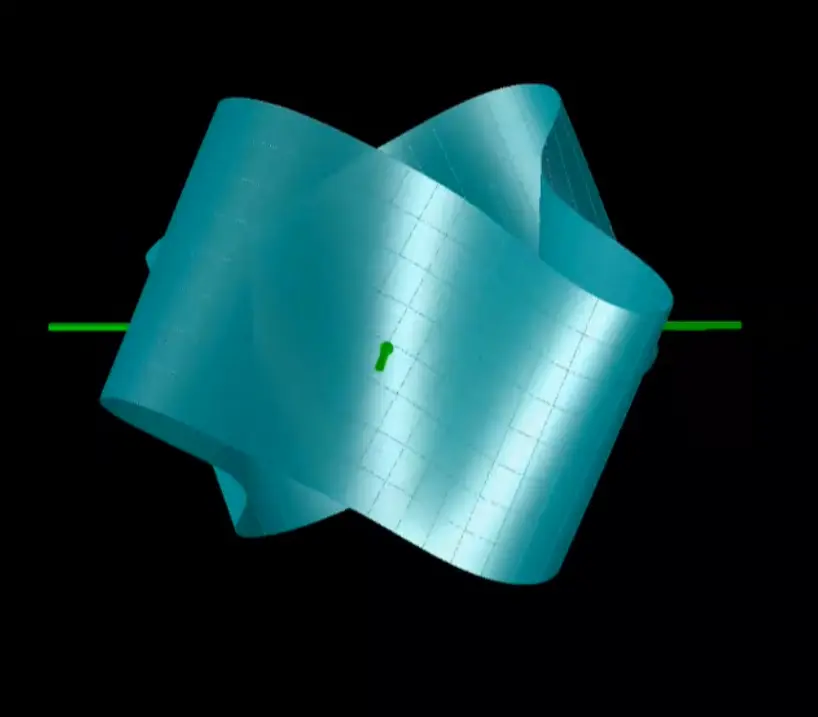
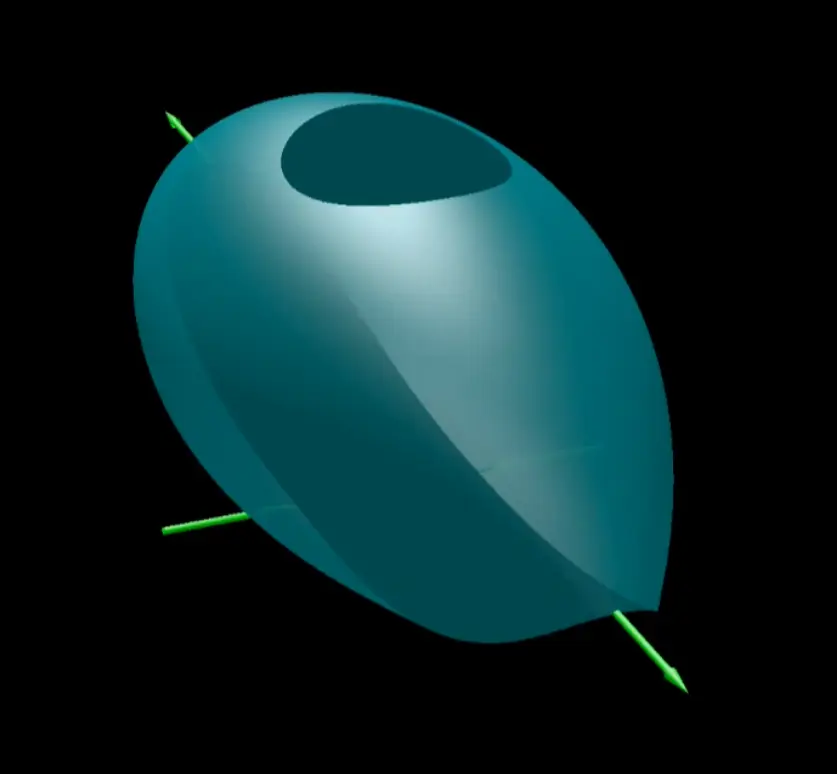
Shells
Work on shells has been focused so far on the development of
an helicoidal shell element. Future work will
be focused on shell constitutive law characterization
procedures.
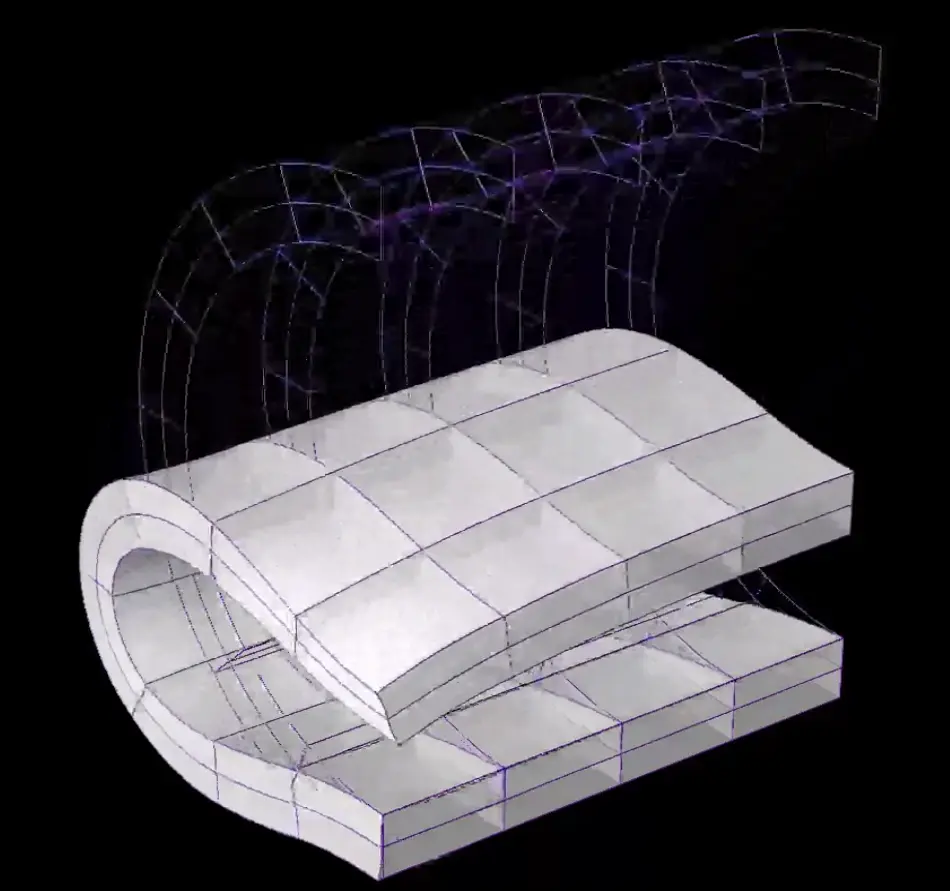
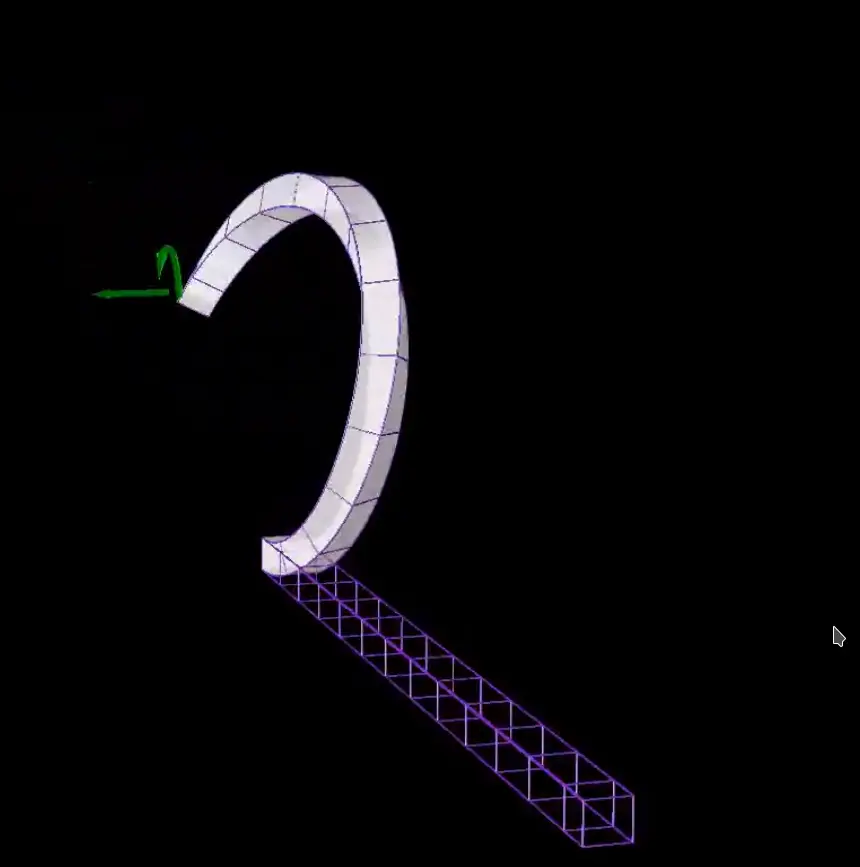
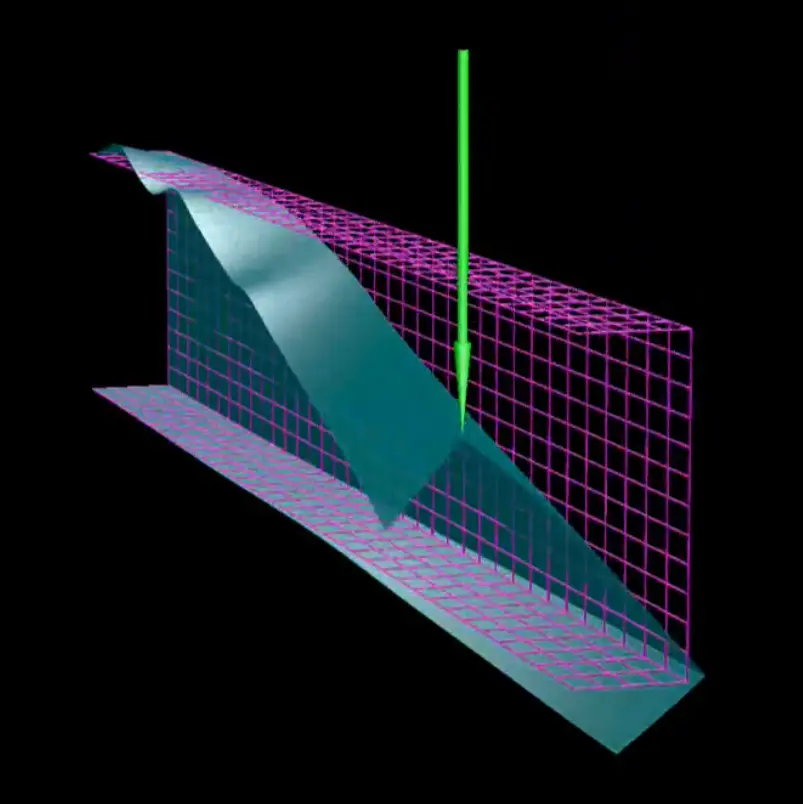
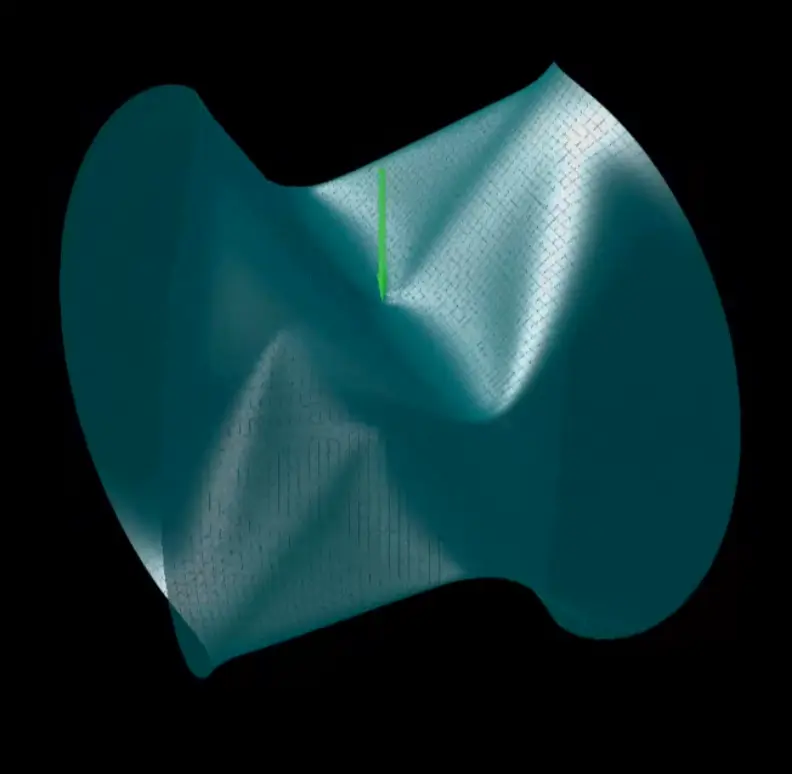
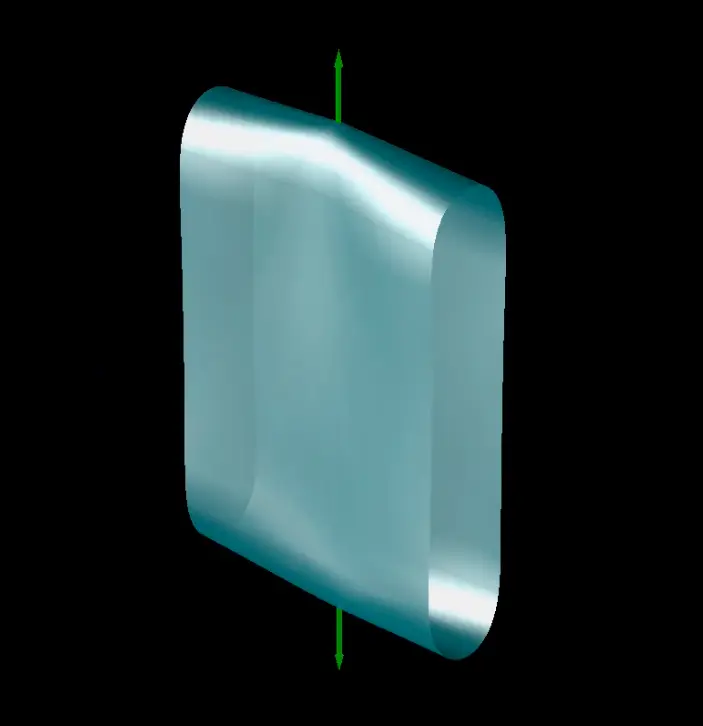
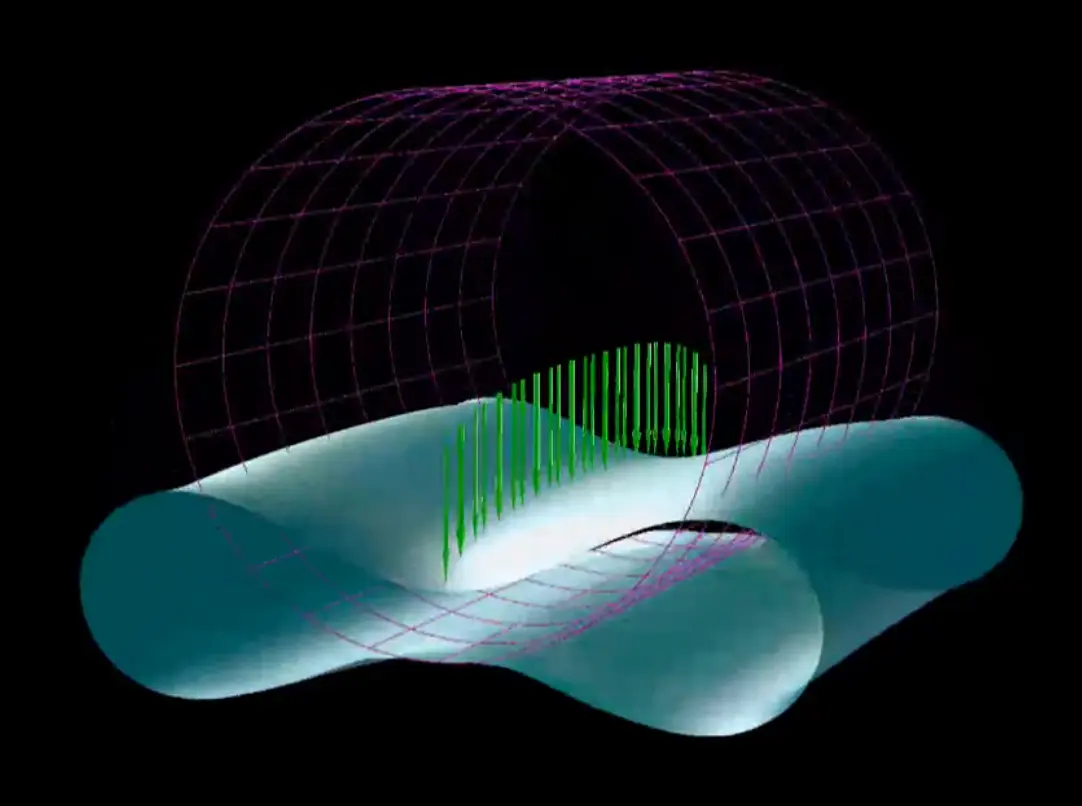
A specialized nonlinear shell element has been developed within the mutibody code MBDyn.
It is currently used, coupling MBDyn with different CFD codes, in order to investigate the dynamic behavior of flapping-wing
insect-like robots.
Multibody
Activities on Multibody Modeling is focused
on the developement of new, advanced joint elements,
on the consistent treatment of rotations and on
algorithmic issues.
The invariant deformable and
the gimbal are perhaps the more complex joints
among those developed so far.
Landing Gears
Modeling and control of active telescopes
Accurate modeling of active telescope mirrors is
of paramount importance for a reliable
and precise prediction of their dynamic.
The simulation model developed together with Prof. Paolo Mantegazza
and Mauro Manetti correctly reproduces
- the effect of the thin fluid film (few micrometers) interposed between the mirror and its underlying reference structure;
- the effect of the position sensor finite dimensions;
- the position sensor and actuator transfer function.